SMPC Doctoral Dissertation Research Framework
About This Architecture
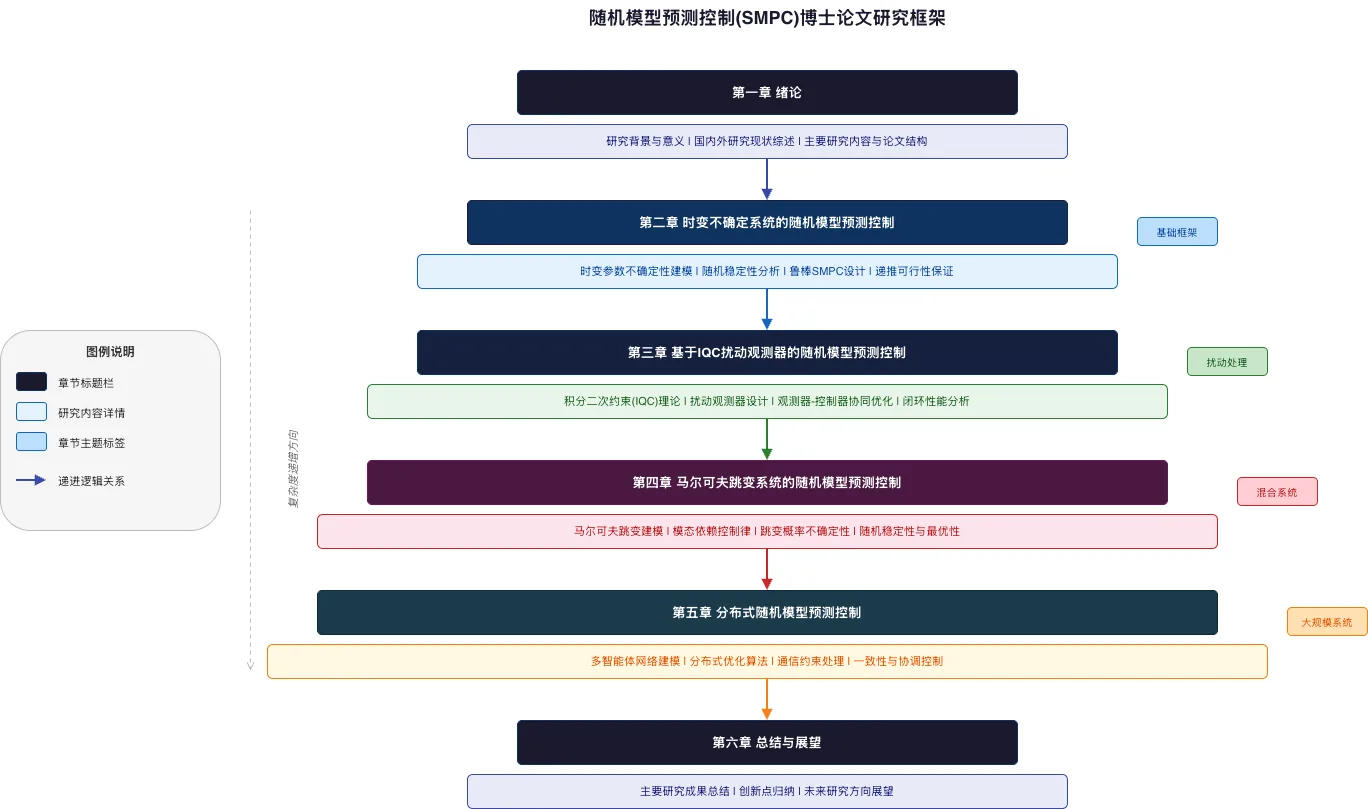
Stochastic Model Predictive Control (SMPC) doctoral dissertation framework progresses from foundational theory through time-varying uncertain systems, IQC-based disturbance observers, Markovian jump systems, and distributed multi-agent architectures. The research builds systematically from robust SMPC design and recursive feasibility guarantees in Chapter 2, through disturbance handling with observer-controller co-optimization in Chapter 3, to hybrid system control with mode-dependent laws in Chapter 4. Chapter 5 extends the framework to large-scale systems via distributed optimization and consensus control under communication constraints. This hierarchical structure demonstrates how SMPC theory scales from single-system robustness to networked multi-agent coordination. Researchers can fork this framework diagram to customize chapters, add implementation details, or adapt it for related control theory dissertations. The progression illustrates increasing complexity and practical applicability across control domains.
People also ask
What is a comprehensive research structure for a doctoral dissertation on stochastic model predictive control?
This SMPC dissertation framework organizes research into six progressive chapters: foundational theory, time-varying uncertain systems with robust design, IQC-based disturbance observers, Markovian jump systems with mode-dependent control, distributed multi-agent optimization, and conclusions. The structure demonstrates how SMPC scales from single-system stability guarantees to large-scale network
- Domain:
- Other
- Audience:
- doctoral researchers and control systems engineers studying stochastic model predictive control
Generated by Diagrams.so — AI architecture diagram generator with native Draw.io output. Fork this diagram, remix it, or download as .drawio, PNG, or SVG.